滤波器的类别
滤波器:一个作用在频域上的窗函数
一般讨论频域范围为[−π,π],然而滤波器必须为偶函数(否则统一频率的正负分量被滤过的情况不同),于是一般只考虑[0,π]上的情况即可
- 高通滤波器(HP)
- 低通滤波器(LP)
- 带通滤波器(BP)
- 带阻滤波器(BS)
- 全通滤波器(AP)
滤波器的参数(设其函数形式为w(ω),对低通滤波器讨论)
- dp:通带容限,表示ωmaxw(ω)−1,ω: ∣w(ω)−1∣≤dp组成的区间为通带,通带的边缘频率为ωp
- ds:阻带容限,表示滤波器旁瓣的最大值,ω: w(ω)≤ds组成的区间为阻带,阻带的边缘频率为ωs
- 理想滤波器截止频率:定义为ωc=w−1(1/2)
- ωp和ωs之间为过渡带,合理的滤波器应满足ωc位于过渡带中点
- 实际滤波器截止频率:定义为w−1(1/2)
即:对于低通滤波器,ωd<ωc<ωs,对于高通滤波器则是ωs<ωc<ωd
系统
系统是具有特定功能的整体,对信号进行某些特定操作
系统的分类
线性系统:满足叠加性和齐次性的系统
时不变系统:系统的输出与时间无关,任何时刻给出同一输入,系统的输出都是相同的;反之为时变系统
线性时不变系统简称LTI系统
因果系统:系统输出只与当前及以前时间的输入有关,与以后时间的输入无关;所有实际系统都是因果系统
稳定系统:输入有界时,输出也有界,即BIBO原则
系统的描述方法
差分方程
y(n)=b01[a0x(n)+a1x(n−1)−b1y(n−1)]
更一般地
k=0∑Nbky(n−k)=r=0∑Marx(n−r)
上述公式中的字母使用是规范,不要改变
N为滤波器涉及的过去输出的个数,也被称为滤波器的阶数
一个速记方法:X-arm, Bynk
流图
见PPT,懒得写了:(
系统的激励和响应
从系统的角度,输入被称为激励,输出被称为响应
零输入响应:系统在没有任何激励信号作用时产生的信号输出
零状态响应:系统内部没有承载信息的能力,给系统激励信号后产生的输出
滤波器的脉冲响应或冲激响应,指的是滤波器的输入是脉冲信号时产生的响应
例如单位冲激
δ(n)={1,0,n=0n=0
例:求下列滤波器脉冲响应的前6个采样值
y(n)=41[x(n)+x(n−1)+x(n−2)+x(n−3)]
解:
h(n)=41[δ(n)+δ(n−1)+δ(n−2)+δ(n−3)]
则
[h(0), h(1), ⋯, h(5)]=[41,41,41,41,0,0]
有限脉冲响应(FIR)滤波器:有限输入后输出总会归零
y(n)=r=0∑Marx(n−r)
无限脉冲响应(IIR)滤波器:一般意义下的滤波器,经过有限输入后输出不一定归零
对于FIR滤波器,很多时候使用级联表达会比直接写出差分方程更加稳定
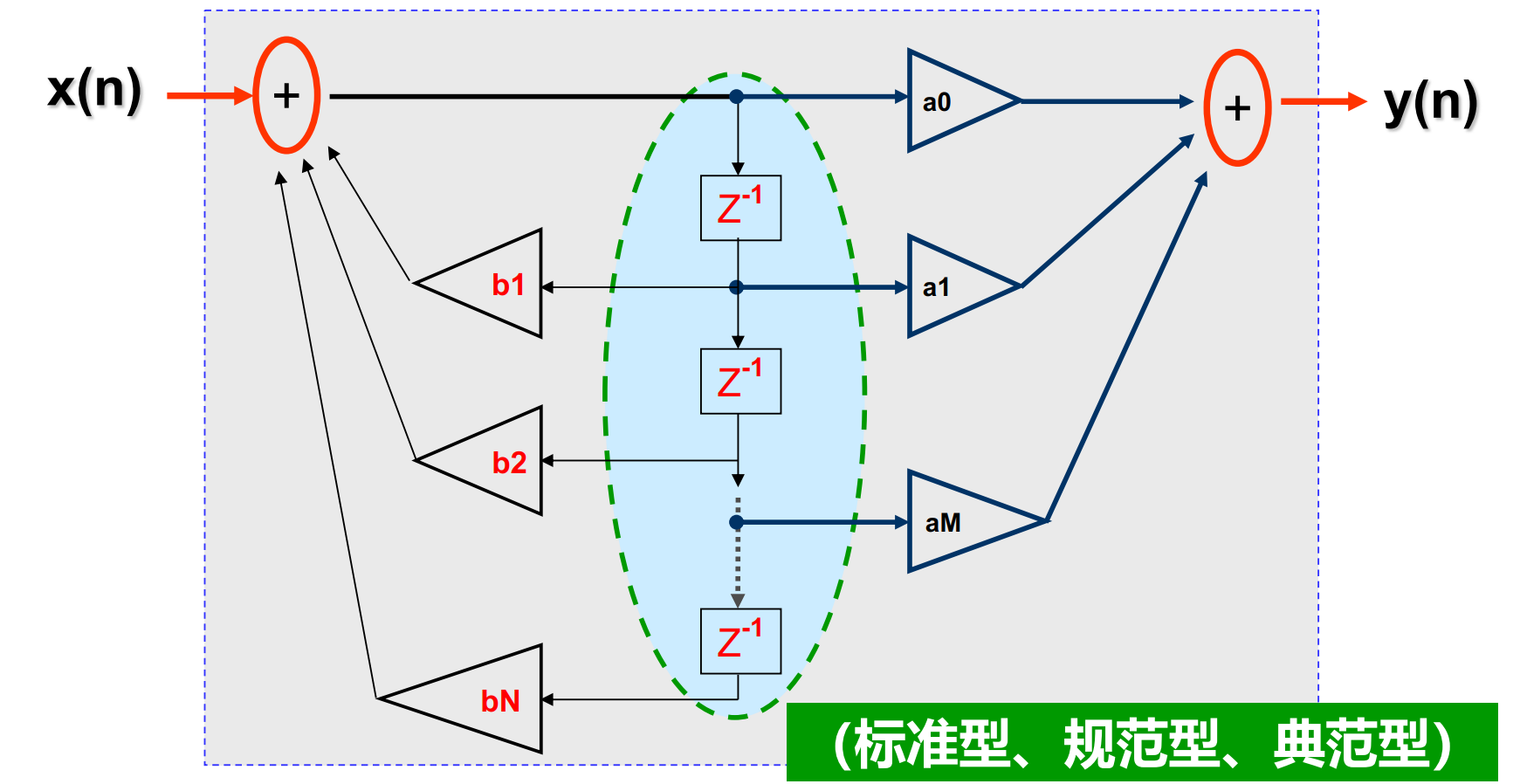
对于IIR滤波器,流图需要增加右侧的反向边,然后变换如下:
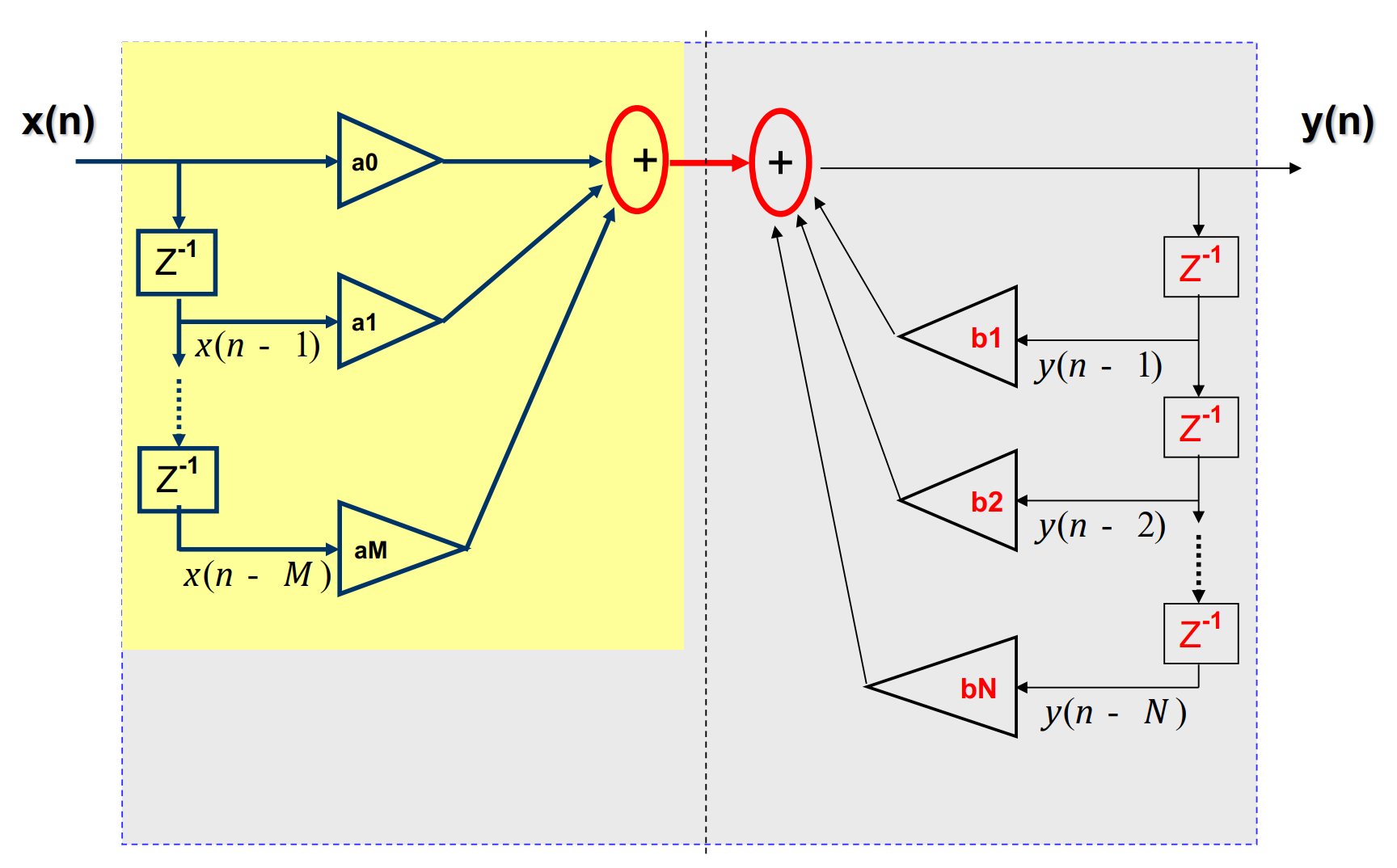
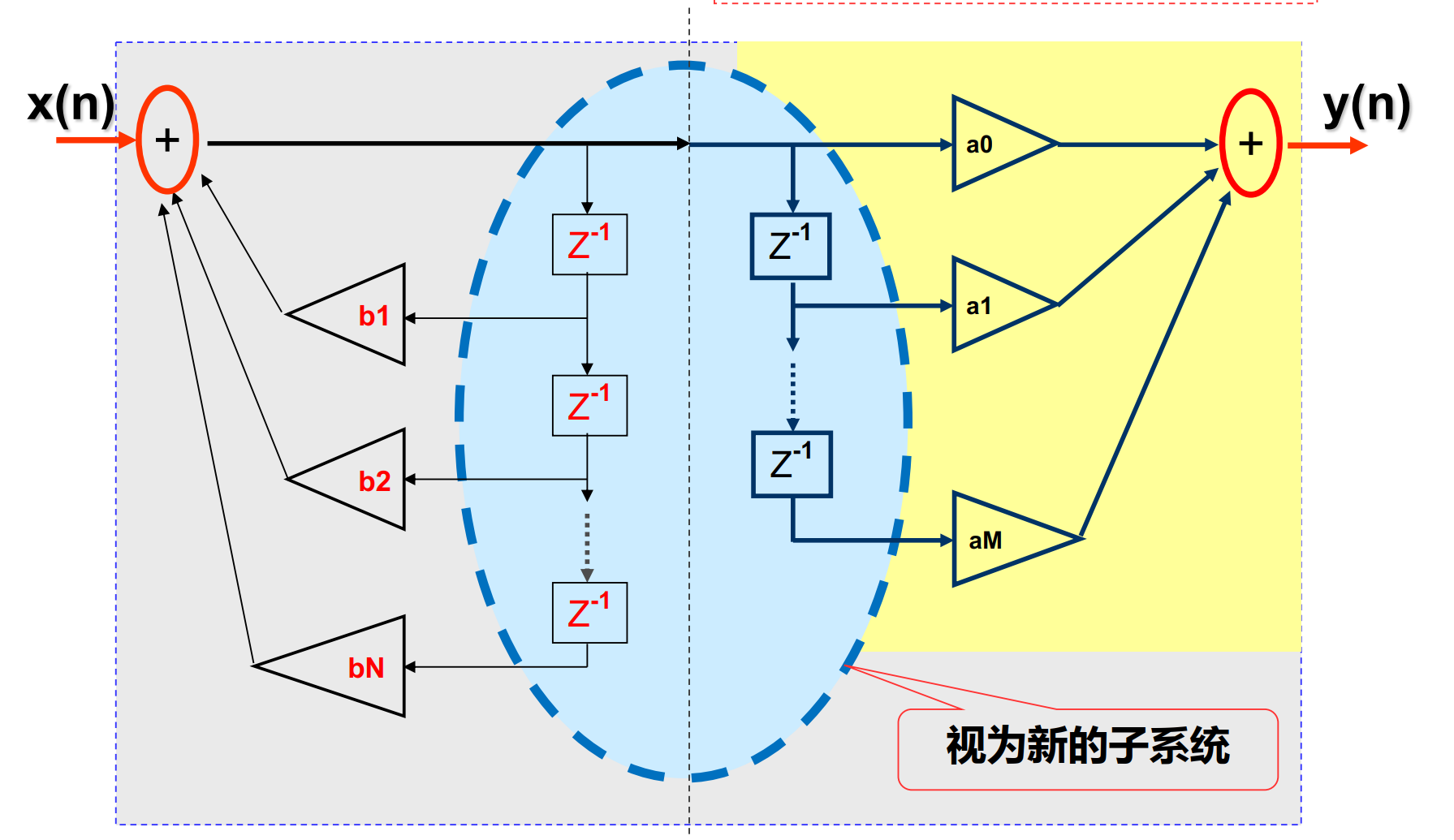
证明:上面的变换前后的流图是等效的
设变换后第一个求和后的信号为z(n),则
z(n)=x(n)+b1z(n−1)+⋯+bNz(n−N)=x(n)+k=1∑Nbkz(n−k)
而右侧为
y(n)=a0z(n)+⋯+aMz(n−M)=r=0∑Marz(n−r)
于是
y(n)=r=0∑Mar(x(n−r)+k=1∑Nbkz(n−r−k))
=r=0∑Marx(n−r)+r=0∑M(ark=1∑Nbkz(n−r−k))
=r=0∑Marx(n−r)+k=1∑N(bkr=0∑Marz(n−r−k))
=r=0∑Marx(n−r)+k=1∑Nbky(n−k)
一个信号可以用脉冲信号的和表示:
x(n)=k=−∞∑+∞x(k)δ(n−k)
由于δ(n)在系统中的响应是h(n),根据系统的线性时不变性可知
y(n)=k=−∞∑+∞x(k)h(n−k)=x(n)∗h(n)
这是从滤波器角度对时域卷积定理的解释。根据滤波器的含义显然有
Y(ω)=X(ω)H(ω)
例 线性时不变系统的稳定的的充要条件是:
n=−∞∑+∞∣h(n)∣=P<+∞
证明:充分性
设系统输入有界,即
∣x(n)∣<B, ∀n
根据线性时不变系统的性质
∣y(n)∣=k=−∞∑+∞x(k)h(n−k)≤k=−∞∑+∞∣x(k)h(n−k)∣
≤k=−∞∑+∞B∣h(n−k)∣=Bk=−∞∑+∞∣h(n−k)∣=BP
即系统稳定
证明:必要性
假设系统稳定,但
n=−∞∑+∞∣h(n)∣=+∞
则构造以下系统激励
x(n)={0∣h(−n)∣h∗(−n)h(−n)=0h(−n)=0
则
y(0)=k=−∞∑+∞x(k)h(−k)=k=−∞∑+∞∣h(−k)∣=+∞
与系统稳定矛盾
脉冲响应的用途:系统串联
假设两个系统串联,即
x(n)⟶h1(n)⟶h2(n)y(n)
则
y(n)=h2(n)∗[h1(n)∗x(n)]=[h1(n)∗h2(n)]∗x(n)
根据卷积的交换律,这和
x(n)⟶h2(n)⟶h1(n)y(n)
x(n)⟶h1(n)∗h2(n)y(n)
等效
即:串联系统的等效脉冲响应是子系统脉冲响应的卷积
系统并联:将x(n)经过h1(n)和h2(n)的响应相加得到y(n),显然系统的等效脉冲响应是
h1(n)+h2(n)
系统的频率响应:表示系统对激励中各频率分量的幅度和相位影响
回忆:
Y(ω)=X(ω)H(ω)
因此系统的频率响应H(ω)就是对输入对应频率分量的选择
频响通常是复值函数:
H(ω)=∣H(ω)∣ejϕ(ω)
其中∣H(ω)∣称为幅频响应,jϕ(ω)称为相频响应
接下来我们从差分方程的角度考虑滤波器的频率响应,考虑差分方程:
k=0∑Nb(k)y(n−k)=r=0∑Ma(r)x(n−r)
由于DTFT是线性变换,我们可以对两边同时取DTFT,得到的结果仍然相等
首先考虑
DTFT[b(k)y(n−k)]=b(k)n=−∞∑+∞y(n−k)e−jnω
=b(k)Y(ω)e−jkω
于是
Y(ω)k=0∑Nb(k)e−jkω=X(ω)r=0∑Ma(r)e−jrω
于是
H(ω)=X(ω)Y(ω)=k=0∑Nb(k)e−jkωr=0∑Ma(r)e−jrω
类似地,我们讨论系统串联和并联时的等效频响,根据DTFT的性质显然有
串联:
H(ω)=H1(ω)H2(ω)
并联:
H(ω)=H1(ω)+H2(ω)